


Institut für Fertigungstechnik und Werkzeugmaschinen
Im Projekt Optidrap erforschen wir automatisierte Drapierprozesse zur Herstellung von Faserverbundbauteilen mit hoher Formkomplexität. Diese Technologie findet beispielsweise Einsatz in der Herstellung neuartiger, vom IFW entwickelter Flugzeugstrukturen.
Ein zentrales Element der Technologie ist das am IFW entwickelte Drapierelement, das mittels pneumatischer, faserverstärkter Elastomer-Aktoren verschiedenste Formen annehmen kann. Dadurch lassen sich im Vergleich zu konventionellen Verfahren deutlich komplexere Strukturelemente fertigen.
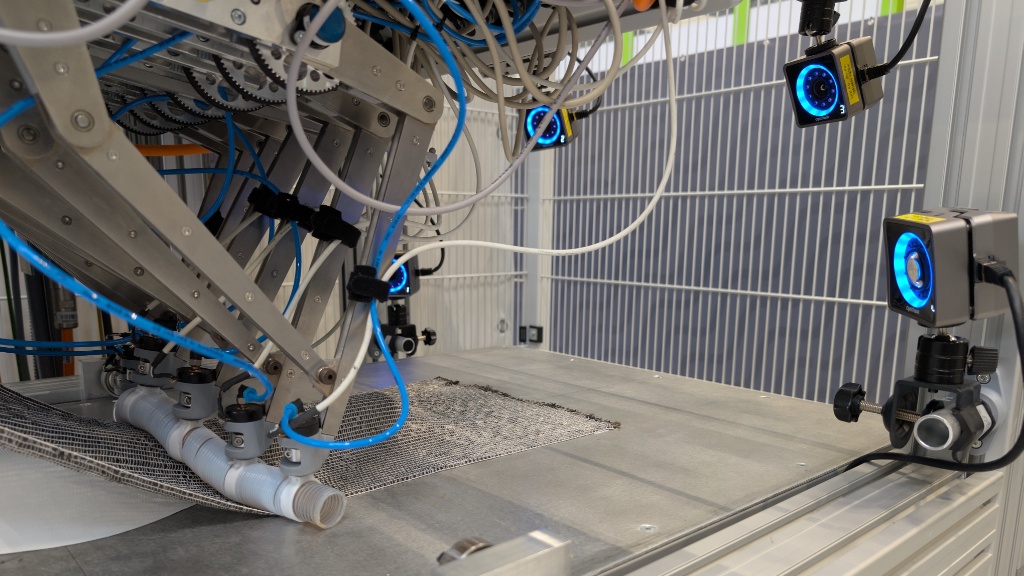
Sechs dieser Elemente, inspiriert von muskulären Prinzipien der Soft Robotics, sind zu einem Kontinuumsaktor verbunden, der durch eine auf mehreren Parallelkinematiken basierte Mechanik in seiner Formgebung unterstützt wird. Eine Erhöhung des Innendrucks der Elemente führt zu einer axialen Längung, ohne den Durchmesser signifikant zu verändern. In Verbindung mit den Parallelkinematiken können so spline-ähnliche Formen erzeugt werden.
Ziel der Arbeit ist die konstruktive und fertigungstechnische Weiterentwicklung dieser Elastomeraktoren zu einem modularen, skalierbaren Systemkonzept. Im Vordergrund stehen dabei die Reproduzierbarkeit der mechanischen Eigenschaften sowie die Integration von Sensorik (Embedded Sensors) zur Erfassung von Flächenpressungen beim Kontakt mit dem zu drapierenden Material.
Du unterstützt uns bei:
- Literaturrecherche im Bereich der Soft-Robotik, Elastomer-Aktoren und Embedded Sensors
- Konzept und Konstruktion eines modularen smarten Elastomer-Aktuators auf Grundlage eines bestehenden Systems
- Prototypische Umsetzung des Elastomer-Aktors in einem abgestimmten Herstellungsverfahren (z. B. Gießen in 3D-gedruckten Formwerkzeugen oder alternative eigene Vorschläge)
- Experimentelle Charakterisierung der mechanischen und sensorischen Eigenschaften des entwickelten Aktors